Autonomous Robot - Page Under Construction
I have finally started development of an autonomous robot. The idea come to me when I made silly agreement with my wife that I would chip in the house work and my new responsibility would be to vacuum the house every weekend. It wasn't long before I realized it really is a mindless job and a waste of valuable time.
This is where the challenge begins :)
Before I could start on design and development I needed to lay down some simple rules and guidelines:
1. Has to be modular in design. This will allow me to port the design to other tasks later on. Possibilities are limitless.
2. Has to be flexible and Plug and Play in design. The CPU should auto detect different modules attached and know what to do with them.
3. All modules are connected through a single serial line to the CPU. Commands will be sent serially and modules will look after execution.
4. The serial bus will in fact be the nervous system of the robot.
5. Modules will include: CPU, Motor Controller, IR, Sonar, WiFi Telemetry, Light sensors, Sound Sensors, Radar, Video, Gyro etc.
6. Must have an easy to use PC control program for task programming.
7. Must be able to find it's own recharging station and automatically recharge when battery power runs low.
8. I will add more as the need arises....
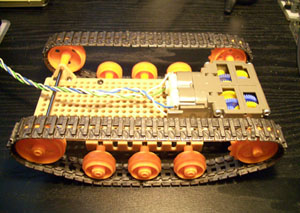
Chassis
I have decided to base my robot on tank tracks as they are more efficient in rolling over small objects that might be in the way. This becomes important when the robot needs to negotiate small steps or roll on to a rag on the floor.
Serial Protocol

The protocol is the glue between all the modules. This section will be altered as I add new modules for use with the robot.
CPU Module
CPU module analyzes all inputs and makes decisions about movement of the robot as well as keeping track of type of modules are present and number of devices on each module.
Motor Controller Module
Motor Controller module is responsible for maintaining correct speed and monitoring battery levels.
![]()
Website hosted by WWW.EazySiteHost.Com |